slup's latest activity
-
 slup replied to the thread Can litchi waypoint missions created on PC be converted over to the Mavic 4 Pro?.Check this --> Litchi Waypoint Mission to DJI Waypoint Mission Converter
slup replied to the thread Can litchi waypoint missions created on PC be converted over to the Mavic 4 Pro?.Check this --> Litchi Waypoint Mission to DJI Waypoint Mission Converter -
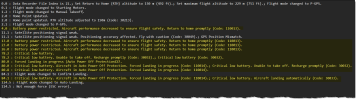
slup replied to the thread Mini 2 flyaway.Never ever start a flight with a battery partly charged that also have been laying around for a long time, always charge your batteries before you fly.
-
slup replied to the thread Mini 2 flyaway.No... this wasn't a flyaway at all. Instead it probably was a flight conducted with a battery that had been laying for a long time & self discharged. The flight started with the battery at 52% (but that was totally wrong as the BMS in the...
-
-
slup replied to the thread Lost my Mini 4 Pro - log shows I was pulling climb but drone kept descending.Maybe the pilot wasn't used to mode 3... & fell back to a mode 2 thinking there close to the water with no height to give him head room to catch himself. The drone might have been piloted by a friend that's usually using mode 2? No, the stick...
-
-
slup reacted to Dogbiscuit's post in the thread Lost my Mini 4 Pro - log shows I was pulling climb but drone kept descending with
 Like.
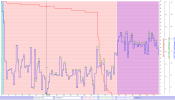
The RC was in Mode 3 and AC was responding to the commanded inputs. The AC was descending with throttle full down at end of log.
Like.
The RC was in Mode 3 and AC was responding to the commanded inputs. The AC was descending with throttle full down at end of log.