Today I flew my MM in a very windy hill, close to me in order to check the new app, 1.2.4. Wind was about the limits of the drone.
No more red notifications about strong winds during my flight. Has somebody checked that?
Happened all the time for no reason with earlier versions, now seems no wind messages at all!
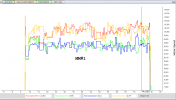
On the other hand I have this message in the log, which may make sense:
Not Enough Force/ESC Error. Aircraft max power load reached. Decrease altitude and fly with caution.
Aircraft max power load reached. Decrease altitude and fly with caution.
If this issue persists, land immediately (Code: 30168)

No more red notifications about strong winds during my flight. Has somebody checked that?
Happened all the time for no reason with earlier versions, now seems no wind messages at all!
On the other hand I have this message in the log, which may make sense:
Not Enough Force/ESC Error.
Aircraft max power load reached. Decrease altitude and fly with caution.If this issue persists, land immediately (Code: 30168)