You made several mistakes during this flight & the lack of knowledge over how your craft works made you panic ... you could easily have saved your
MA2 but you let it descend into the water unfortunately. All this should be classified as a pilot error nothing else.
-You drained your battery way to far, deliberately canceled the Low battery RTH prompt
-You didn't know anything about the Low battery forced auto landing, when it should kick in or how to stay airborne once activated.
-You was in a semi automated flight mode (Active track) which here & there had some influence over the horizontal speed of your craft, and this would have been clearly indicated on your screen ... you could have easily got out of that by just flipping the mode switch back & forth.
-Once the Low battery forced auto landing was active you panicked ... applied all sorts of stick inputs besides the correct ones. You should have aimed your craft towards closest solid ground, applied forward speed in that direction ... & during this applied throttle for ascent to stop the auto descent.
This shows the erratic & panicked flight path you commanded your
MA2 to take ... red X indicate start of Low battery forced auto landing & crash into the water ...
View attachment 142544
You had 3 shorter moment of Active track in the beginning of the flight ... & one long instance starting at 1078sec into the flight which was auto cancelled when the auto landing started.
Checking off how well your stick commands actually worked in the charts below ...
Starting with the Elevator stick (right stick, forward/backward):
The slightly grayer light blue background color to the left = GPS mode with APAS active
The lighter blue background = Low battery forced auto landing active
The red graph = Height above your HP
The green graph = Heading speed
The dashed blue graph = your elevator stick command (right stick, forward/backward, value 1024 is stick neutral)
It's seen in several places before the Low battery auto landing kick in that this movement is somewhat restrained ... this due to you being in Active track mode.
In the logs message stream we find this that could have been the reason ...
View attachment 142546
(Elevator stick vs. heading speed ... click on the chart to make it larger)
View attachment 142545
In the rudder commands we see nothing odd ... the craft responds well & accurate.
Red graph = Height again
Green graph = Adding & subtracting yaw angle
Dashed Blue graph = Rudder stick command (left stick, left/right, value 1024 is stick neutral)
(Rudder stick vs. yaw angle change ... click on the chart to make it larger)
View attachment 142547
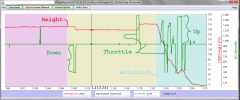
When it comes to the throttle inputs they respond as usual before the Low battery auto landing ... when the landing is active the craft will descend with neutral stick ... but slowly ascend with stick at max for ascend. It's easy to see that this you didn't know, when you do the right thing your craft gains altitude ... but you mostly didn't apply enough throttle for ascend so your craft mostly drop it's height & eventually hit the water.
Red graph = Height
Green graph = vertical speed where negative values is ascend & positive is descend
Dashed blue graph = Throttle stick command (left stick, forward/backwards, value 1024 is stick neutral)
(Throttle stick vs. vertical speed ... click on the chart to make it larger)
View attachment 142548
Here below the sad facts about your battery management ...
Red graph = height
Green graph = Battery percentage
Blue graph = Low battery RTH threshold in percent which is distance from HP dependent
Purple graph = Low battery RTH countdown seen on your app screen
Black graph = Low battery forced auto landing threshold in percent which is height dependent
(Click on the chart to make it larger)
View attachment 142549


 Uploaded to DJI, as I have Refresh,but many say it takes a long time for them to get back to you. Anyone know how to look at this?
Uploaded to DJI, as I have Refresh,but many say it takes a long time for them to get back to you. Anyone know how to look at this?