AnzacJack
Australian Defence Veteran
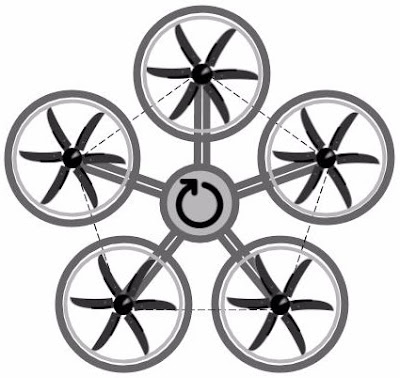
A lot of inherent problems related to torque, are avoided with an even number of motors... Btw, do five rotors (instead of four) not present the more obvious choice? In the picture you can see that there's a more even distribution of lifting power with a 'pentacopter' if one rotor fails. Even when two rotors show failure (as long as they are not adjacent). Hence, one can imagine rotating the assembly itself, so that left and right are balanced...