- Joined
- Dec 18, 2016
- Messages
- 39
- Reactions
- 44
- Age
- 47
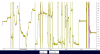
After the awesome DIY rear compass cabling fix, I only had one remaining issue. The occasional unwanted switch from GPS to ATTI mode when you least expect it. Now as @BudWalker has mentioned in the past, the switch to ATTI mode was usually preceded by a large deviation between Yaw and magYaw in CsvView. (usually 30 deg or more difference) I had previously been calibrating my compass as the new app shows, with second rotation with Mavic on it's side. I just switched to the second rotation "nose down" method as indicated in the manual this morning. By examining Yaw vs. magYaw from CsvView both prior to my switch and after, I can see a fairly dramatic difference over several flights. It seems Yaw and magYaw never deviated more than 10 deg now as I flew two full batteries through many different maneuvers. No ATTI events yet but need much more testing. In the plots below, I had just calibrated in both conditions this morning, in my backyard far from any metal object.
Has anyone else experienced this? Does nose down compass calibration result in less ATTI mode events and better Yaw / magYaw tracking?
After compass cal on side (lots of magYaw deviation)

After compass cal with nose down (much less magYaw deviation)

Has anyone else experienced this? Does nose down compass calibration result in less ATTI mode events and better Yaw / magYaw tracking?
After compass cal on side (lots of magYaw deviation)
After compass cal with nose down (much less magYaw deviation)