

Hey all, Had a pretty crappy night and panicking now how much I'll have to pay in repairs. Trying to understand why my Mavic 3 flew forward without me controlling it to do so. I have uploaded the flight logs to Phantom Logs to try understand what may have went wrong I arrived down at the location this evening. A location I have flew from many many times and never had a single issue. I powered up my drone and noticed a few errors pop up mainly ambient light too low, I was sat in the car at the time with the drone not in motion trying to gage what ND filter I would need as I was planning on taking some long exposure shots of City hall, so gathered that was the cause for that as once I was out of the car this disappeared. Once I had determined the correct ND filter I got out of the car to take off and got a warning saying I needed to calibrate, so I spend some further time recalibrating the drone. Once I had done this, it all corrected itself. This was up to around 32 seconds in the logs, Can be seen that the drone never went higher than 5 foot to this point as I was calibrating the drone. While hovering, I had noticed the two errors that came up between 10 and 14 seconds and again from the logs it can be seen I never raised the drone, I corrected the issues before hovering the drone again. After checking multiple times that everything was working as it should and I was receiving no further error messages I began to ascend around 50 seconds into the log. At around one minute as I was slowly ascending I noticed the drone randomly started to fly forward, I tried to correct this by pulling back but to no avail. It was at 1 min 3.9s the drone collided with the building. I have noticed from looking at the logs that the location is incorrect as by looking at the map it's showing I took off a few stories up on a roof... where as I took off beside the "Margot" building. My instant assumption was that possibly I had lost GPS and my drone had went into ATTI mode but there's no indication this was the case as the drone was in P-GPS(BRAKE) the entire time and never entered ATTI. I can see the satellites dropped but that was already after the drone stopped responding to me. Happy to share the Phantom logs if anyone can help me possibly understand what went wrong, if it was my fault or an issue with the drone. If it makes any difference with regards to signal I'm using an RC Pro controller. |
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Mavic 3 Crash - Drone flew forward without me controlling it
- Thread starter chreesh
- Start date

Welcome to the Forum!
Sucks to see somebody posting the first time, with a crash, etc.
The link is not working, try it for your self.
Took a look here.
 mavicpilots.com
mavicpilots.com
This maybe simplest for a quick start.
 www.phantomhelp.com
.
www.phantomhelp.com
.
Rod ..
Sucks to see somebody posting the first time, with a crash, etc.
The link is not working, try it for your self.
Took a look here.
Mavic Flight Log Retrieval and Analysis Guide
With the introduction of the Mavic Mini there has been a noticeable uptick in the number of posts requesting help with lost or crashed aircraft. While there is plenty of help and advice available on this forum, and detailed guidance and options on several other websites, I thought that perhaps a...
mavicpilots.com
This maybe simplest for a quick start.
DJI Flight Log Viewer | Phantom Help
Upload and view flight logs from your DJI drones
www.phantomhelp.com
Rod ..
Hi there, this is the link to it DJI Flight Log Viewer - PhantomHelp.comWelcome to the Forum!
Sucks to see somebody posting the first time, with a crash, etc.
The link is not working, try it for your self.
Took a look here.
Mavic Flight Log Retrieval and Analysis Guide
With the introduction of the Mavic Mini there has been a noticeable uptick in the number of posts requesting help with lost or crashed aircraft. While there is plenty of help and advice available on this forum, and detailed guidance and options on several other websites, I thought that perhaps a...
This maybe simplest for a quick start.
.DJI Flight Log Viewer | Phantom Help
Upload and view flight logs from your DJI drones
Rod ..
It's a strange one as I have taken off from this exact location 10+ times as it allows me to maintain VLOS and never had an issue at all until now.
At 58s the drone accelerates away from position with no Pitch and or Roll inputs and doesn't enter ATTI mode
Yorkshire_Pud
Well-Known Member
Uuum sorry about the crash but the first thing that comes to my mind is, is flying a Mavic 3 in the centre of Belfast wise or legal ?
One of the mini's might be a better choice.
You were fairly close, 3.5km from the end of the George Best Airport runway, though I do not remember if night flights and landings are permitted.
You had a maximum height set at 500m and RTH height of 100m.
Belfast has changed a lot since I was last there so I do not know if there are any very tall buildings between Adelaide St and the City Hall that would need a height 100m to clear.
I am not being drone police but merely concerned about saving you some possibly uncomfortable discussions with the PSNI and perhaps the Harbour Police.
One of the mini's might be a better choice.
You were fairly close, 3.5km from the end of the George Best Airport runway, though I do not remember if night flights and landings are permitted.
You had a maximum height set at 500m and RTH height of 100m.
Belfast has changed a lot since I was last there so I do not know if there are any very tall buildings between Adelaide St and the City Hall that would need a height 100m to clear.
I am not being drone police but merely concerned about saving you some possibly uncomfortable discussions with the PSNI and perhaps the Harbour Police.
I'm a2ofC qualified. I went out with my Mavic 3 as I intentionally chose to fly at 11:30pm as that would mean there was no uninvolved people at this time of night, no congested areas or traffic, I wouldn't be flying over any uninvolved person and The spot at which I took off would allow me to keep VLOS at all times. So I could get the best image possible with the better night capabilities.Uuum sorry about the crash but the first thing that comes to my mind is, is flying a Mavic 3 in the centre of Belfast wise or legal ?
You were fairly close, 3.5km from the end of the George Best Airport runway, though I do not remember if night flights and landings are permitted. You had a maximum height set at 500m and RTH height of 100m.
Belfast has changed a lot since I was last there so I do not know if there are any very tall buildings between Adelaide St and the City Hall that would need a height 100m to clear.
I am not being drone police but merely concerned about saving you some possibly uncomfortable discussions with the PSNI and perhaps the Harbour Police.
With regards to it being legal, here is the no fly zone for The City airport, I am outside of the restricted zone Drone Safety Map | Altitude Angel
Last edited:
Yorkshire_Pud
Well-Known Member
Fair enough, it looked as if you were outside the no fly zone but the map I had is crap, your's is much better, thanks.I'm a2ofC qualified. I intentionally chose to fly at 11:30pm as that would mean there was no uninvolved people at this time of night, no congested areas or traffic, I wouldn't be flying over any uninvolved person and The spot at which I took off would allow me to keep VLOS at all times.
With regards to it being legal, here is the no fly zone for The City airport, I am outside of the restricted zone Drone Safety Map | Altitude Angel
Is Belfast still an early to bed place?
I did wonder if it would be deserted at that time.
Have you compared the flight tracks for your previous flights from there with the flight track of this flight.
It might also be an idea to check the csv's for the previous flights to see the GPS number and quality,
columns OSD.gpsNum & OSD.gpsLevel.
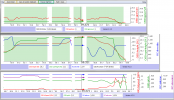
The attached is the result of processing the csv from Phantomhelp with CsvViewI noticed the drone randomly started to fly forward, I tried to correct this by pulling back but to no avail.
In the last 15 or so seconds I no reverse elevator, value < 1024, to stop forward motion but you did close the throttle around 60 second, could you have been confused?
Attachments
Last edited:
Yeah pretty much, after around 10pm the city centre empty. Most of the shops don't even open past 5:30/6pm now.Fair enough, it looked as if you were outside the no fly zone but the map I had is crap, your's is much better, thanks.
Is Belfast still an early to bed place?
I did wonder if it would be deserted at that time.
Have you compared the flight tracks for your previous flights from there with the flight track of this flight.
It might also be an idea to check the csv's for the previous flights to see the GPS number and quality,
columns OSD.gpsNum & OSD.gpsLevel.
The attached is the result of processing the csv from Pahntomhelp with CsvView
That I can see it shows no reverse elevator, to stop forward motion, in the last 15 or so seconds but you did close the throttle arounf 60 second, could you have been confused?
Yeah on all of those flights there were no issues what so ever, was able to take off and land with no issues.
This is where the GPS is a little confusing, At 58s drone accelerates away from position with no Pitch and or Roll inputs, this is when as I was slowly ascending and the drone started accelerating forward, but if I look at the GPS co-ordinates at this point the drone is facing the wrong direction in which this event was happening in real time. I was pulling the throttle back to try stop the forward movement but on the GPS it shows I was facing a completely different direction so could this has resulted in a different command than what I was trying to achieve ?
Yorkshire_Pud
Well-Known Member
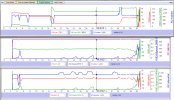
Throttle does not control speed, throttle controls height, the throttle seems to be your left stick.
Elevator, right stick control fore / aft horizontal speed, the elevator seems to be your right stick.
Moving the left stick towards you will cause the drone to descend, you did not touch the elevator after 54 seconds.
As far as I know GPS does not indicate the direction in which the drone is pointing, nor does it indicate the direction of movement unless you yourself are calculating the latter from the changes in coordinates.
The attached shows
1) the heading of the drone and the use of rudder.
2) roll and the use of the aileron ( virtually none ), at a guess the blips in roll are wind eddies.
3) pitch and the use of the elevator.
It looks to me as if the drone followed all the rudder inputs quite faithfully but you really need @BudWalker or @slup or @Meta4 .to look at that.
Elevator, right stick control fore / aft horizontal speed, the elevator seems to be your right stick.
Moving the left stick towards you will cause the drone to descend, you did not touch the elevator after 54 seconds.
As far as I know GPS does not indicate the direction in which the drone is pointing, nor does it indicate the direction of movement unless you yourself are calculating the latter from the changes in coordinates.
The attached shows
1) the heading of the drone and the use of rudder.
2) roll and the use of the aileron ( virtually none ), at a guess the blips in roll are wind eddies.
3) pitch and the use of the elevator.
It looks to me as if the drone followed all the rudder inputs quite faithfully but you really need @BudWalker or @slup or @Meta4 .to look at that.
Attachments
And here when you powered up the drone in the car... could it have been any magnetic interference disturbing the compass?...I powered up my drone and noticed a few errors ...I was sat in the car at the time with the drone not in motion
Needed to calibrate what... the compass?...I got out of the car to take off and got a warning saying I needed to calibrate...
And I assume that you here mean that the yaw direction indicated in the log (as seen in PhantomHelp log viewer)... doesn't match the yaw direction the drone actually had during the incident?... if I look at the GPS co-ordinates at this point the drone is facing the wrong direction in which this event was happening in real time.
All above strongly indicate that the compass was magnetically disturbed when you powered on the drone there in the car. If that was the case, the IMU should have been initiated in the same deflected direction as the compass. If all this was the case, the drone didn't have the correct info about in which direction it was pointing when you launched... your drone now had a so called Yaw error coming from you powering on the drone in magnetic interference.
The consequence coming from a yaw error is that once the drone needs to correct & hold it's position (counter winds for instance) it will try to do that with the wrong motors... & this doesn't bring the drone back to position, instead the positional error just grows & the drone tries over & over again but fails... this is why a drone can speed away uncommanded.
If this really was a pilot caused yaw error, is hard to say just out from a .TXT log as we there doesn't have access to the sensor data from the compass, IMU & Gyro, a DAT log is needed for that, but for a Mavic 3 that one is encrypted... but out from what you describe this flight really looks to have all the right ingredients.
And lastly... just so you know.
Nothing you did with your powered drone while the motors wasn't running aren't in a .TXT log... this log type only runs between motor start & stop.
And more...
"Pulling back" on the throttle (left stick backwards) means descend... & will not stop a forward movement. You did this twice in the end... & the drone also descended. Used the wrong stick in panic I recon?...I was pulling the throttle back to try stop the forward movement...
Yorkshire_Pud
Well-Known Member
And here when you powered up the drone in the car... could it have been any magnetic interference disturbing the compass?
But I do not see any rotation of the drone that does not correspond to a rudder input ....... am I mistaken?
Last edited:
Yorkshire_Pud
Well-Known Member
Since you post follows one of mine..... Uum if by any chance you meant me, thanks but no way, lol.
There are quite a few on this forum who are far, far, FAR better than me.
Dig through some of the older crash threads and have a look at some of the discussions involving @slup , @sar104 , @BudWalker , @boblui and @Meta4.
Since you post follows one of mine..... Uum if by any chance you meant me, thanks but no way, lol.
There are quite a few on this forum who are far, far, FAR better than me.
Dig through some of the older crash threads and have a look at some of the discussions involving @slup , @sar104 , @BudWalker , @boblui and @Meta4.
There is one in that group I'm not familiar with.
I have been following theses types of threads since 2015 starting on the PP forum.
You go from the facts!
One reason for that statement.
If your not sure then you, alert others.
I have a twist and then go back to watching, instead of posting.
One of my dads Lines "It's hard to be humble, when your great"
I'm actual going to send him a link to this thread.

Rod ..
I'm not following you?But I do not see any rotation of the drone that does not correspond to a rudder input ....... am I mistaken?
Even during a yaw error the drone don't have any reason to yaw uncommanded... the only instance I can think of that could cause it, is when you get a IMU problem mid flight, that could cause a rotation in the log but not in reality & then you have a yaw error, but not due to magnetic interference during power on.
If the drone points north in reality... but after the IMU initialization with a compass deflected by 180 degrees... the drone think's it points south... you start to fly & turn the drone with the rudder stick... the yaw values follow the commands nicely movement wise (but all values is shifted by 180 degrees).
Why would you see a "rotation of the drone that does not correspond to a rudder input" ?
Yorkshire_Pud
Well-Known Member
I have the impression that, in a yaw error flight there is often an apparent, sudden and uncommanded change of heading.I'm not following you
This happens as the drone leaves the area of interference, I do not see that in this log.
The search continues. The answer is out there!
My vote is with poor satellite quality and compass interference from being started up inside or near the vehicle.
In any event, sorry to hear about the damage. It is a good learning opportunity.
My vote is with poor satellite quality and compass interference from being started up inside or near the vehicle.
In any event, sorry to hear about the damage. It is a good learning opportunity.
In the DAT log you will see a clear change in the signal magYaw (the compass value, which you don't have in a TXT log) when leaving the interference... the IMUYaw have no reason to change.I have the impression that, in a yaw error flight there is often an apparent, sudden and uncommanded change of heading.
This happens as the drone leaves the area of interference, I do not see that in this log.
Think you mixing thing's up between compass/IMU & TXT/DAT log...
When it comes to the "poor satellite quality"... we don't need to speculate, it's right there in the log the OP shared & the quality was good enough & that didn't cause this incident. The GPS message in the log came after the incident started when the drone crashed....My vote is with poor satellite quality and compass interference from being started up inside or near the vehicle.
It's the fact that there is no change in yaw that leads to erratic flight. Yaw gets set incorrectly when the AC powers up in a geomagnetically distorted field. And, then continues to be incorrect even after the AC has left the distortion.In the DAT log you will see a clear change in the signal magYaw (the compass value, which you don't have in a TXT log) when leaving the interference... the IMUYaw have no reason to change.
Think you mixing thing's up between compass/IMU & TXT/DAT log...
Similar threads
- Replies
- 24
- Views
- 2K
- Replies
- 28
- Views
- 2K
- Replies
- 19
- Views
- 1K
- Replies
- 59
- Views
- 5K
- Replies
- 19
- Views
- 3K







DJI Drone Deals
1. Mini 2
2. Mini 3 Pro
3. Mini 4 Pro
4. Air 2s
5. Air 3
6. Avata 2
7. Mavic 3 Pro
8. Mavic 3 Classic
2. Mini 3 Pro
3. Mini 4 Pro
4. Air 2s
5. Air 3
6. Avata 2
7. Mavic 3 Pro
8. Mavic 3 Classic
New Threads
-
What am I doing wrong? Unlock after LAANC approval.
- Started by twickers14
- Replies: 0
-
-
-

Forum statistics
