Trying to get a better understanding of how to read the flight logs to determine causes of unexpected flight behavior. Couple days ago I was flying over a lake, with RTH height set at 200ft (I confirmed during flight, and flight logs agree). I put the drone to a height of 170ft and initiated RTH. As expected, the drone held horizontal position while it ascended to 200ft, and then it started it's horizontal return. Unexpectedly though, it also continued to climb, although at a slower pace. It got up to 366ft before I finally canceled RTH. I manually dropped down to 201ft, initiated RTH, and it immediately started it's horizontal return, but like before, continued a slow ascent. I canceled this one when it reached about 345ft, and which point I manually dropped back down to 201ft, and flew it back with the sticks. During the manual fly back, the drone did not ascend like it did during the RTH, it held it's height perfectly. When I got back to shore, I initiated another RTH while at a height of 120ft, and this time it worked as expected. It ascended to 200ft and flew back, while holding the 200ft height the whole way.
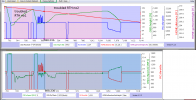
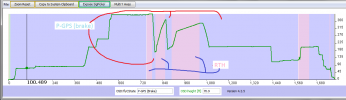
I went through the Flight Log to try to find any indication of what was happening during the unexpected climbs. There was no stick input (RC.aileron, RC.elevator, RC.throttle, RC.rudder were all at 1024), OSD.vpsHeight [ft] showed 83.7 (which I assume is the upper limit, since it never went higher than that the whole flight), OSD.flycState, OSD.flycCommand, OSD.flightAction were all Go Home, OSD.gpsLevel stayed at 5 throughout, OSD.isBarometerDeadInAir was false, OSD.isCompassError was false, OSD.isVisionUsed was false, MC.isAvoidingObstacle was false, MC.isAvoidingActiveObstacle was false, and MC.isAscentLimitedByObstacle was false. What other values should I be looking at to try to find the reason behind the behavior I experienced, or is this something that can't be determined from the logs?
I went through the Flight Log to try to find any indication of what was happening during the unexpected climbs. There was no stick input (RC.aileron, RC.elevator, RC.throttle, RC.rudder were all at 1024), OSD.vpsHeight [ft] showed 83.7 (which I assume is the upper limit, since it never went higher than that the whole flight), OSD.flycState, OSD.flycCommand, OSD.flightAction were all Go Home, OSD.gpsLevel stayed at 5 throughout, OSD.isBarometerDeadInAir was false, OSD.isCompassError was false, OSD.isVisionUsed was false, MC.isAvoidingObstacle was false, MC.isAvoidingActiveObstacle was false, and MC.isAscentLimitedByObstacle was false. What other values should I be looking at to try to find the reason behind the behavior I experienced, or is this something that can't be determined from the logs?