Hi all,
I'd like to hear from you to see if I made a mistake or if my drone is faulty.
I just got my MA Combo last Friday, previously had experiences with cheap drones, no GPS whatsoever.
After flying for a couple of hours in my backyard and in the park during the weekend, no issues whatsoever, even tried tracking and apas in trees, etc., yesterday I had the nice idea of trying to film my employees with the rocket preset.
I went on the terrace, noone around for safety, and tested the drone for a dry run to avoid injuries. The terrace is at the first floor between two 12m buildings.
I made a compass calibration as required by the app, checked the GPS quality (10 sats), used auto-takeoff (with precision mode if I recall) and started flying. As soon as I reached the top of the building a crow seemed to be irritated by the drone and started flying around it, possibly with the intention of attacking it. I therefore decided to land it for safety and after lowering the drone manually, I decided to demonstrate RTH to few employees observing from windows.
It all went fine until about 5 meters above: the drone went nuts and directed itself towards the wall of our building. I tried to cancel RTH to no avail (only later I learned that the quickest way is to toggle sports mode on/off), but also thought the front sensors would do their job. Needless to say (otherwise I wouldn't be writing this) that they didn't! And the drone crashed into the wall.
I managed to recover it by pulling the joystick backwards and downwards and hand-land it, so the only damage was to propellers, but I'd really like to know what went wrong.
The only mistakes I understand I made, apart from not being able to interrupt RTH are:
- failing to bring the side bumpers along (furthermore due to the intention to film my employees), perhaps that would have avoided the damage to propellers
- not checking if the RTH home was accurately set
But neither justifies the behaviour of the drone. Even if RTH home had been set inside the building by mistake (talking absurd), it should have not crashed into a concrete wall in my opinion. Unless there is a reason why RTH turns off sensors, which I believe shouldn't happen.
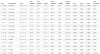
Log attached, after reading it I only see it went ATTI for a second, but otherwise GPS coverage was sufficient.
Thanks in advance for your comment and support, I would really like to know if it was the pilot's or drone's fault and in such case if I should have done anything differently, apart of the 2 points above.
I'd like to hear from you to see if I made a mistake or if my drone is faulty.
I just got my MA Combo last Friday, previously had experiences with cheap drones, no GPS whatsoever.
After flying for a couple of hours in my backyard and in the park during the weekend, no issues whatsoever, even tried tracking and apas in trees, etc., yesterday I had the nice idea of trying to film my employees with the rocket preset.
I went on the terrace, noone around for safety, and tested the drone for a dry run to avoid injuries. The terrace is at the first floor between two 12m buildings.
I made a compass calibration as required by the app, checked the GPS quality (10 sats), used auto-takeoff (with precision mode if I recall) and started flying. As soon as I reached the top of the building a crow seemed to be irritated by the drone and started flying around it, possibly with the intention of attacking it. I therefore decided to land it for safety and after lowering the drone manually, I decided to demonstrate RTH to few employees observing from windows.
It all went fine until about 5 meters above: the drone went nuts and directed itself towards the wall of our building. I tried to cancel RTH to no avail (only later I learned that the quickest way is to toggle sports mode on/off), but also thought the front sensors would do their job. Needless to say (otherwise I wouldn't be writing this) that they didn't! And the drone crashed into the wall.
I managed to recover it by pulling the joystick backwards and downwards and hand-land it, so the only damage was to propellers, but I'd really like to know what went wrong.
The only mistakes I understand I made, apart from not being able to interrupt RTH are:
- failing to bring the side bumpers along (furthermore due to the intention to film my employees), perhaps that would have avoided the damage to propellers
- not checking if the RTH home was accurately set
But neither justifies the behaviour of the drone. Even if RTH home had been set inside the building by mistake (talking absurd), it should have not crashed into a concrete wall in my opinion. Unless there is a reason why RTH turns off sensors, which I believe shouldn't happen.
Log attached, after reading it I only see it went ATTI for a second, but otherwise GPS coverage was sufficient.
Thanks in advance for your comment and support, I would really like to know if it was the pilot's or drone's fault and in such case if I should have done anything differently, apart of the 2 points above.

")