

Yorkshire_Pud
Well-Known Member
Yeah sorry, I realized that after posting and corrected my response.

Sorry but the power consumption during free fall will, I think, be minimal.
Basically pretty close to that when the drone is sitting powered up on a table etc..
There may be some additional power usage as it will be trying to keep the gimbal 'true' but I would suspect that that doesn't use much.
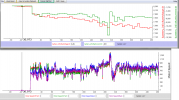
Someone with a mini 3 pro could test this by switching everthing, drone, controller, phone, on and have the drone sit on a table for 30 sec or so, then pick the drone up and wobble a fair bit for 30 seconds or so, then post the .DAT flight log.
We could then compare the power consumption during the two phases of the experiment.
I do not know in the mini 3 creates a readable .DAT.
Last edited:




")






