Hello all,
I am flying a Mini 4 Pro and since I am a newbie, I stay cautious while experiencing the extremes. All my firmware, software are up to date.
My question is about determining the most appropriate flight height for each waypoint.
I need to mention that, the area I am living has a terrain of many irregularities including hills, valleys, deep slopes, many ups and downs etc. This means that, I have to be very careful while deciding which flight heights I should set, for a waypoint mission. Determining the flight height AGL of waypoints, makes sometimes a huge difference if the purpose of the flight is a photogrammetry or 3D modelling mission. Note that, no RTK's or GCP's etc are involved.
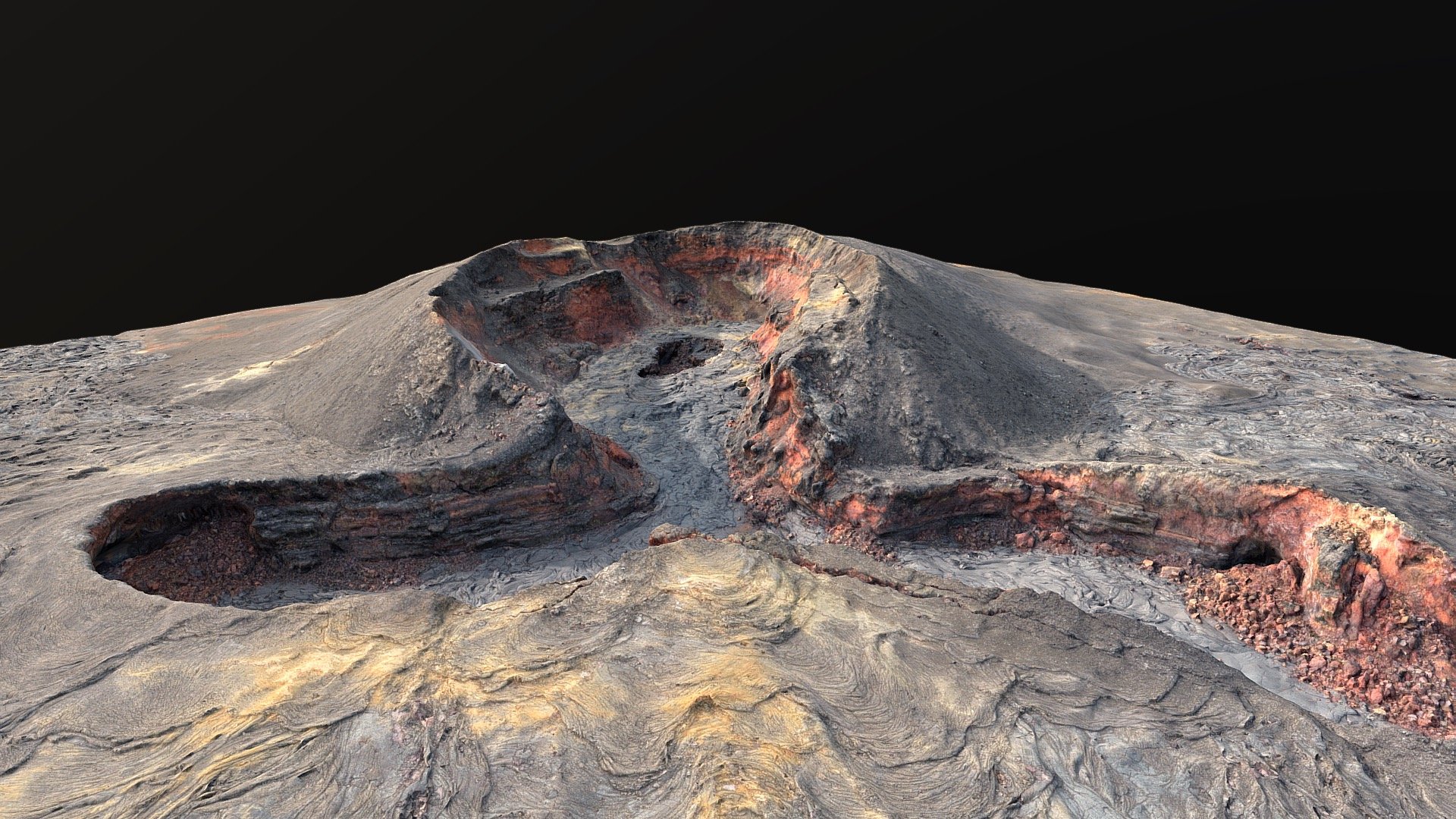
For the example below:

A flight altitude of say 20 meters may be good for some portion of the land, but at some point I will be hitting the ground on a hilltop. Therefore, I have to set the flight altitude to 40 meters to be super safe. However, this time the distance from the drone to the ground will differ at subsequent waypoints, which will adversely affect the detail of the surface captured and hence an uneven outcome will not make anybody happy.
To overcome this problem, do I have to adjust the altitude of each and every waypoint to simulate the terrain, like the below figure shows?

You can imagine that, it is a very tedious work to manually adjust the altitudes of many waypoints and furthermore if I accidentally forget to adjust one of them, I may hit the hilltop. (Or, should I expect that the obstacle avoidance system of M4P take care of such cases and will push my drone up vertically until it is safe to fly to its original route?)
Note that, in such an area we are putting only an estimate of clearance with what Google Earth offers and our insight over our visual limits in the horizon ahead. Unfotunately, this makes it a "guesstimate", right? And it is far from being technically sufficient. I have looked up almost all threads on this forum about waypoint mission questions and watched all waypoint videos on youtube, but none of them pinpoint any information on this specific situation.
What is your suggestion for this specific question?
Thanking to all in advance, for their kind input.
I am flying a Mini 4 Pro and since I am a newbie, I stay cautious while experiencing the extremes. All my firmware, software are up to date.
My question is about determining the most appropriate flight height for each waypoint.
I need to mention that, the area I am living has a terrain of many irregularities including hills, valleys, deep slopes, many ups and downs etc. This means that, I have to be very careful while deciding which flight heights I should set, for a waypoint mission. Determining the flight height AGL of waypoints, makes sometimes a huge difference if the purpose of the flight is a photogrammetry or 3D modelling mission. Note that, no RTK's or GCP's etc are involved.
For the example below:
A flight altitude of say 20 meters may be good for some portion of the land, but at some point I will be hitting the ground on a hilltop. Therefore, I have to set the flight altitude to 40 meters to be super safe. However, this time the distance from the drone to the ground will differ at subsequent waypoints, which will adversely affect the detail of the surface captured and hence an uneven outcome will not make anybody happy.
To overcome this problem, do I have to adjust the altitude of each and every waypoint to simulate the terrain, like the below figure shows?
You can imagine that, it is a very tedious work to manually adjust the altitudes of many waypoints and furthermore if I accidentally forget to adjust one of them, I may hit the hilltop. (Or, should I expect that the obstacle avoidance system of M4P take care of such cases and will push my drone up vertically until it is safe to fly to its original route?)
Note that, in such an area we are putting only an estimate of clearance with what Google Earth offers and our insight over our visual limits in the horizon ahead. Unfotunately, this makes it a "guesstimate", right? And it is far from being technically sufficient. I have looked up almost all threads on this forum about waypoint mission questions and watched all waypoint videos on youtube, but none of them pinpoint any information on this specific situation.
What is your suggestion for this specific question?
Thanking to all in advance, for their kind input.
Last edited: