Yorkshire_Pud
Well-Known Member
Wind will cause the motors to change speed, the drone changes tilt to fight wind and changing tilt requires individual motors to change speed.Thank you for that. Have in mid that at this time the wind was quite strong atm. That can cause this behavior? Also do you have any sugestion what can cause this, and any possible fix? Thanks again!")
Additionally, when a drone is tilted less of the propellers' thrust is available to keep the drone at the desired height. Basically that means that the motors have to turn faster so that the vertical component of the propellers' thrust matches the drone's weight. The greater the tilt the faster the motors must turn to keep the drone at the desired height.
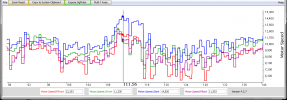
BUT what I take from the above traces is that the motors went crazily fast whilst the barometer was indicating the erroneous descent to negative heights i.e. I think the control system was trying to fight what it thought was an
Hmmm "there are none so blind as those that will not see" I have just realised that the log reports that during the 'descent' of around 217 -220 the log 'thinks'/shows that the throttle was closed during that descent, hmmmmm???.
Looking at the csv downloaded from PH. At 216.9 sec the drone was at 11.8ft and the throttle was centred, according to the log you then partially closed the throttle for around 0.2 sec then centred it again, that partial throttle started the drone descending. ( The VPS height 'agrees' with the barometer height between 216.9 sec and 217.2 sec and possibly 217.3 sec but I think VPS malfunctions after 217.3 sec. Rhetorically, why would the VPS malfunction at that moment? )
HOWEVER, the drone continues to 'descend' for the following 0.5 sec whilst the throttle was centred. The descent should have stopped within that 0.5 sec but the descent rate "OSD.Zspeed [MPH]" actually increases.
We are now around 217.6 sec - 217.7 sec with the drone 'very close' to ground level.
According to the log at 217.7 sec you started to close the throttle and, ignoring the centred blip at 220.7 sec, held the throttle partially closed or fully closed until 222 sec when the drone was supposedly at -86.8ft (not its lowest point).
Obviously something is wrong here since the ground was flat and negative heights were not possible but I am puzzled/confused as to why the log 'thinks' you had the throttle closed.
Last edited:

 .
.






 ), and the problems went off. In my opinion, mostly the vibration due to different props were messing with drone due to ESC error. Thank you all for your help. I hope someone will come across this post and fix his own drone. BR, Michał
), and the problems went off. In my opinion, mostly the vibration due to different props were messing with drone due to ESC error. Thank you all for your help. I hope someone will come across this post and fix his own drone. BR, Michał