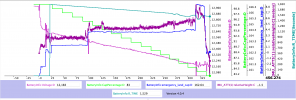
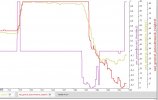
Yes finally it was probably caught by a wave, I suppose they were max 1ft high. As I wrote I decreased alt from ~9 meters to hover on 3 meters and from now on I didn't touch the throttle. Altimeter was still showing ~3 meters but in the real the drone constantly decerased the altitude until hit the water. Last few seconds txt data shows stable ~ 3 meters but in dat/csv I see slow alt decrease on all signals.You had the Mini hovering low above the water and applied up-throttle at 5:42.9.
The data shows that the drone did begin to rise and climbed 0.4 metres before the data suggests that the drone hit the water at 5:43.2.
One explanation for this might be the drone being caught by a wave?
But there is a problem with your flight data - the Verbose CSV file is empty so the data from the downward sensors isn't available so I cannot confirm this.
How close to the water was the drone hovering?
Was the sea flat calm or was there wave action?
How high were the waves?
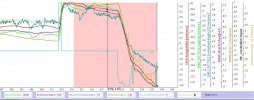
No idea why there is no data in your file but I've opened dat as well as datcon converted csv in CsvView and all data was there.
Uploading zipped csv:
Attachments
Last edited: