

Bright white with the metal in the middle is the new prop. The metal is definitely a difference. The brand is called Flypig.Here are the pictures. I also, recalibrated the controller and tried to fly the P3. It is still difficult to control and will not hover in place. There is little change if any.

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Crashed Phantom - Learning to fly used Phantom prior to Mavic Air purchase
- Thread starter TigerWoodsofFishing
- Start date
Yorkshire_Pud
Well-Known Member
If you spin the motors with your fingers, especially the ones that had broken props, do any feel different from the rest? With a prop properly mounted and spun rapidly by hand does the prop wobble as if a motor shaft was bent?
Are there any cracks in the shell under or around each motor mount?
It looks as if the shell has sprung a bit between the arrows in the attached photo, is it? If so has it sprung anywhere else?
Are there any cracks in the shell under or around each motor mount?
It looks as if the shell has sprung a bit between the arrows in the attached photo, is it? If so has it sprung anywhere else?
Attachments

I looked closely and you are correct. I also wonder if this motor is tilted slightly.If you spin the motors with your fingers, especially the ones that had broken props, do any feel different from the rest? With a prop properly mounted and spun rapidly by hand does the prop wobble as if a motor shaft was bent?
Are there any cracks in the shell under or around each motor mount?
It looks as if the shell has sprung a bit between the arrows in the attached photo, is it? If so has it sprung anywhere else?
Attachments



Yorkshire_Pud
Well-Known Member
The motor are intentionally tilted, I think it aids control, that scared me too the first time I saw it.
I think the size of the angle of lean of each motor is the same but the directions may differ. Just had a look at a P3 Adv and, with respect to a fore aft line, they all lean outwards and, when looking from the side, towards one another.
What about cracks under the motors?
I think I may have found the motor speeds, if that is correct then they look quite even, which is good, I think.
The first 4 plots below show the speeds during FLY230 plus the throttle setting and the height.
The 5th plot shows the plot for a P3adv with as close a flight profile as I could find, Primarily up and down though, during that flight, I did intentionally go up and down more than you.
If those are your P3S's motor speeds I am wondering why they are higher than those of my P3Adv, I think they are the same prop but the P3Adv is slightly heavier than the P3S so everything else being equal the P3Adv should have the faster motor speed.
I think the size of the angle of lean of each motor is the same but the directions may differ. Just had a look at a P3 Adv and, with respect to a fore aft line, they all lean outwards and, when looking from the side, towards one another.
What about cracks under the motors?
I think I may have found the motor speeds, if that is correct then they look quite even, which is good, I think.
The first 4 plots below show the speeds during FLY230 plus the throttle setting and the height.
The 5th plot shows the plot for a P3adv with as close a flight profile as I could find, Primarily up and down though, during that flight, I did intentionally go up and down more than you.
If those are your P3S's motor speeds I am wondering why they are higher than those of my P3Adv, I think they are the same prop but the P3Adv is slightly heavier than the P3S so everything else being equal the P3Adv should have the faster motor speed.
Attachments
Yorkshire_Pud
Well-Known Member
I am loading some now. Do the older flight records get written over or expire? I am only seeing flight records back to the day of the crash. I am hoping there are good flights on that day as well as the crash.Can you dig up any pre crash DAT's for comparison?
Unfortunately, the P3S does not record motor data such as RPM, current, temp, etc. The PWM_output data is motor commanded data; e.g. a value of 50% means the flight controller is telling the motor to turn at 50% of max RPM.The motor are intentionally tilted, I think it aids control, that scared me too the first time I saw it.
I think the size of the angle of lean of each motor is the same but the directions may differ. Just had a look at a P3 Adv and, with respect to a fore aft line, they all lean outwards and, when looking from the side, towards one another.
What about cracks under the motors?
I think I may have found the motor speeds, if that is correct then they look quite even, which is good, I think.
The first 4 plots below show the speeds during FLY230 plus the throttle setting and the height.
The 5th plot shows the plot for a P3adv with as close a flight profile as I could find, Primarily up and down though, during that flight, I did intentionally go up and down more than you.
If those are your P3S's motor speeds I am wondering why they are higher than those of my P3Adv, I think they are the same prop but the P3Adv is slightly heavier than the P3S so everything else being equal the P3Adv should have the faster motor speed.
I loaded flights from the day of 4/13 as I do not see anything earlier. The crash either occurred on the 13 or 14th. I know I flew it successfully in the afternoon of 4/13 around 1pm or so. The times associated with the flight data is in the early evening of 4/13 so possibly after my successful last flight.
 drive.google.com
drive.google.com
DJI Phantom Files - Google Drive
drive.google.com
I looked closely and I do not see any cracks other than the one that in front.Unfortunately, the P3S does not record motor data such as RPM, current, temp, etc. The PWM_output data is motor commanded data; e.g. a value of 50% means the flight controller is telling the motor to turn at 50% of max RPM.
Yorkshire_Pud
Well-Known Member
Well that's a pity but thanks.Unfortunately, the P3S does not record motor data such as RPM, current, temp, etc. The PWM_output data is motor commanded data; e.g. a value of 50% means the flight controller is telling the motor to turn at 50% of max RPM.
On the P3 Adv I believe the older records are over written, certainly the older ones disappear, I've lost some that way but at a guess the actual memory device in a P3Adv maybe a 'glued in' mSD card (I have seen one and it might have been 4Gb.I am loading some now. Do the older flight records get written over or expire? I am only seeing flight records back to the day of the crash. I am hoping there are good flights on that day as well as the crash.
Looking at my records, after I have lost some i.e. they have been overwritten or whatever, the next batch seems to be about 2.5Gb's worth (all the same "date created" date).
Last edited:
Yorkshire_Pud
Well-Known Member
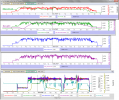
Of the additional DATs only 207 produces 'useful' results for me. Given what BudWalker said above I don't know if the following shows anything useful but here it is anyway. In case you are interested these charts are produced by CsvView CsvView Downloads
Attachments

Are you sure @BudWalker ...Unfortunately, the P3S does not record motor data such as RPM, current, temp, etc. The PWM_output data is motor commanded data; e.g. a value of 50% means the flight controller is telling the motor to turn at 50% of max RPM.
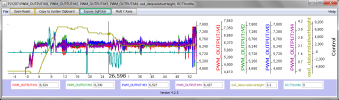
To me it looks like the MotorCtrl: PWM signal is the motor command ... and the PWM_OUTPUT signal could be the rpm's.
All looks odd though, at 25,1sec for instance ... motor commanded to 100% & that only generates 6878rpm's ? at neutral throttle ??? And which motor is M1-M8?
But if this really is correct it could generate symptoms like those the OP describes.

Are you sure @BudWalker ...
To me it looks like the MotorCtrl: PWM signal is the motor command ... and the PWM_OUTPUT signal could be the rpm's.
All looks odd though, at 25,1sec for instance ... motor commanded to 100% & that only generates 6878rpm's ? at neutral throttle ??? And which motor is M1-M8?
But if this really is correct it could generate symptoms like those the OP describ
I can run it longer now and upload a new flight data log if you think it would be helpful to attempt to fly it up a bit and then watch what it does as it descends. It wont hover without me using the stick to give it lift.What would you suggest? I am thinking that I may want to try different props just to be sure its not a prop issue. I found these on Amazon. It appears that the DJO site does not offer new replacement props any longer.
Yorkshire_Pud
Well-Known Member
I was thinking, what about taking the props off and start the motors using the CSC. Then give them slight throttle, note slight throttle, not a lot, and place a finger on a rotor for maybe a second, to slow the motor slightly, then release the rotor.
DO NOT stop/stall the motor or slow it down a lot and DO NOT slow it for a long time, I have seen ESC warnings from a crashed P3 that was trying to start blocked motors and you certainly do not want to cook an ESC.
Wait and see what the others say before attempting this.
If the PWM_output is the numerical or percentage value of commanded output then wouldn't it remain unchanged? If it is actual motor rpm then the DAT should record a drop in speed, shouldn't it?
DO NOT stop/stall the motor or slow it down a lot and DO NOT slow it for a long time, I have seen ESC warnings from a crashed P3 that was trying to start blocked motors and you certainly do not want to cook an ESC.
Wait and see what the others say before attempting this.
If the PWM_output is the numerical or percentage value of commanded output then wouldn't it remain unchanged? If it is actual motor rpm then the DAT should record a drop in speed, shouldn't it?
Don't know for sure what PWM_OUTPUT is but I assume it's the average voltage obtained from the PWM signal. It needs to be scaled. Don't think it's RPM since it has the value 3760 before the motors start.Are you sure @BudWalker ...
To me it looks like the MotorCtrl: PWM signal is the motor command ... and the PWM_OUTPUT signal could be the rpm's.
All looks odd though, at 25,1sec for instance ... motor commanded to 100% & that only generates 6878rpm's ? at neutral throttle ??? And which motor is M1-M8?
But if this really is correct it could generate symptoms like those the OP describes.
View attachment 147145

There is a bug in DatCon that causes the corrupt data error when a P3 .DAT does not have a motor start.Of the additional DATs only 207 produces 'useful' results for me. Given what BudWalker said above I don't know if the following shows anything useful but here it is anyway. In case you are interested these charts are produced by CsvView CsvView Downloads
FLY207.DAT appears to be the incident flight described in post #1
That the P3 can't keep itself airborne without adding in some throttle clearly points to that not enough thrust is generated ... so either something going on with those 3:rd party props ... perhaps they doesn't have enough pitch or gets flattened during operation & just barely can get the P3 up in the air with near to max RPM's. Or the motors doesn't reach RPM's corresponding to the command % ... perhaps due to mechanical damage making them hard to turn or electronically limited in some way ... perhaps damaged ESC's.
By just comparing the command % between my own Mavic Air with what's seen in FLY230.DAT from the P3 it's clear that something is wrong ...
Don't think much more than this can be determined out from the P3 log i'm afraid.
My MA:
A auto take off with a following hover ... it's a near headwind slightly from the left, that's why the rear right is higher commanded & the front left lower commanded. But the average commands are around 45%.

The P3:
The helping throttle commands are seen here, but the average commands aren't changing much compared to zero throttle ... the average commands seems to be around 80%. This doesn't give much headroom for corrections before the command goes to full 100% which it does on a regular basis.

By just comparing the command % between my own Mavic Air with what's seen in FLY230.DAT from the P3 it's clear that something is wrong ...
Don't think much more than this can be determined out from the P3 log i'm afraid.
My MA:
A auto take off with a following hover ... it's a near headwind slightly from the left, that's why the rear right is higher commanded & the front left lower commanded. But the average commands are around 45%.
The P3:
The helping throttle commands are seen here, but the average commands aren't changing much compared to zero throttle ... the average commands seems to be around 80%. This doesn't give much headroom for corrections before the command goes to full 100% which it does on a regular basis.
Do these constitute DJO OEM parts? I am unable to find anything on the DJI website itself, but these are offered via Amazon.If props are different than original, could be the problem. Aftermarket props are notoriously bad. If you have mismatched them with dji props even worse. I’ve seen them brake of fly off on takeoff. Worse, fail at 400’. You may be lucky it won’t fly. Buy DJI oem props. 3rd party say “For” P3 instead of “Original”.
Besides DJI, Master Airscrew props will work
Attachments

Thanks guys. I am in search of appropriate P3 replacement blades. I flew it again yesterday and it was slightly easier to control. Perhaps simply because I am unfortunately becoming more used to the flight problems. There is no longer a wobble (I ran the IMU multiple times) it continues to drift down and backwards. I am keeping my fingers crossed that it is a 3rd party prop issue. StephenThat the P3 can't keep itself airborne without adding in some throttle clearly points to that not enough thrust is generated ... so either something going on with those 3:rd party props ... perhaps they doesn't have enough pitch or gets flattened during operation & just barely can get the P3 up in the air with near to max RPM's. Or the motors doesn't reach RPM's corresponding to the command % ... perhaps due to mechanical damage making them hard to turn or electronically limited in some way ... perhaps damaged ESC's.
By just comparing the command % between my own Mavic Air with what's seen in FLY230.DAT from the P3 it's clear that something is wrong ...
Don't think much more than this can be determined out from the P3 log i'm afraid.
My MA:
A auto take off with a following hover ... it's a near headwind slightly from the left, that's why the rear right is higher commanded & the front left lower commanded. But the average commands are around 45%.
View attachment 147170
The P3:
The helping throttle commands are seen here, but the average commands aren't changing much compared to zero throttle ... the average commands seems to be around 80%. This doesn't give much headroom for corrections before the command goes to full 100% which it does on a regular basis.
View attachment 147171
Similar threads
- Replies
- 10
- Views
- 472
- Replies
- 21
- Views
- 585
- Replies
- 3
- Views
- 1K
- Replies
- 28
- Views
- 4K






DJI Drone Deals
New Threads
-
-

-
DJI Talks About The DJI BAN | The Lobbying.
- Started by mavic3usa
- Replies: 0
-
Hiring Remote Drone Pilots and Support Staff with CrewBloom
- Started by felixleo
- Replies: 1
Forum statistics
