OK - here is an alternative and more likely explanation. The initialized IMU heading for this flight, which is determined by the compass data at power up, was 44° - i.e. NE. Subsequent rudder inputs produce reasonable changes in yaw, and there are no indications in the log of any compass problems:
![DJIFlightRecord_2018-03-25_[10-03-43]_conv_05.png](https://mavicpilots.com/data/attachments/34/34393-efb31fc6821c77ea018adb787a3c665d.jpg?hash=77MfxoIcd- "DJIFlightRecord_2018-03-25_[10-03-43]_conv_05.png")
However, if you are correct and the initial yaw (heading) was actually 220° (SW), then the IMU yaw value was almost exactly 180° off. If that offset continued unnoticed (and there are no compass errors indicated during the recorded flight), then it will have had very serious consequences.
Specifically, if the aircraft started to drift on the wind, even slightly, then in order to hold position it will have applied directional thrust to counter the motion. In this case, the wind was blowing from the SW, and so it started drifting NE or NNE. Since the IMU indicated that the aircraft was facing that direction, the FC pitched the aircraft backwards to counter it. If the aircraft was actually facing SW then the backward pitch accelerated the drift rather than countering it. Similarly with the roll.
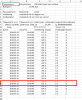
Correcting the initialized yaw value to your estimated original heading, and recomputing the forwards and sideways velocities with the revised yaw gives the following:
![DJIFlightRecord_2018-03-25_[10-03-43]_conv_04.png](https://mavicpilots.com/data/attachments/34/34399-84f23f3d0796e9650ed01f03d48e4ef3.jpg?hash=hPI_PQeW6W "DJIFlightRecord_2018-03-25_[10-03-43]_conv_04.png")
Now the recorded velocities are consistent with the applied pitch and roll - no significant wind needed to account for the motion.
If this analysis, based on your estimated initial yaw, is correct, then the problem was not wind driven at all (apart from some initial low-speed drift), but was instead due to significant magnetic interference at the launch point that was not detected by the FC, leading to the aircraft orientation being 180° off from reality. The FC cannot navigate in that situation, and attempting to hold position led to the aircraft flying NE at full speed.
I've seen a couple of these cases, where the aircraft would normally detect the problem and switch to ATTI returning full control to the pilot, but doesn't do so in time. Compass errors of around 90° cause the toilet bowl flight path (as predicted) and 180° errors cause full speed linear flight in the wrong direction.
DJI have replaced aircraft due to this kind of event where the takeoff location was the problem, probably because of a lack of notification of the compass error (even though it may inherently be undetectable), so it is worth pointing out what happened and asking them to cover it.




![DJIFlightRecord_2018-03-25_[10-03-43]_conv_03.png](https://mavicpilots.com/data/attachments/34/34377-39a45677d74ce869b2d382c2215b3e89.jpg?hash=OaRWd9dM6G "DJIFlightRecord_2018-03-25_[10-03-43]_conv_03.png")