Yesterday I was flying my mini 3 pro and it decided to no input descend. I realized it was going AWOL and hard up pressed the left control stick to counteract the steady drop but no luck.
Last image I saw was murky brown water on my RC controller. I went to the storm pond and it is disgusting (algae filled), with city bylaw notices prohibiting swimming. From what i can tell the water looks very deep...
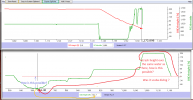
Any flight log experts see anything weird with the final moments of life? (link is the youtube video)