


- Joined
- Jul 1, 2017
- Messages
- 7
- Reactions
- 0
- Age
- 60
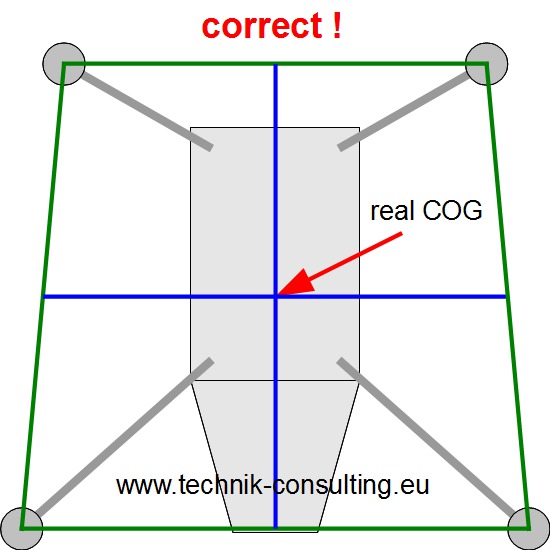
If you lift the Mavic with the two diagonal opposite motors (on the propellers hub), the Mavic will lean heavily forward ("nose heavy").
This "mechanical" design imbalance is strange ... , and as a consequence, provokes a problem that can be seen when you decent the Mavic vertically down at max speed (full throttle low), ... the controller/motors can't keep the Mavic level and a noisy wobbling appears very clearly!
The only reason i see they made this compromise, is the folding design restrictions and the free field of view for the camera (no propellers)
Sad imo...
This "mechanical" design imbalance is strange ... , and as a consequence, provokes a problem that can be seen when you decent the Mavic vertically down at max speed (full throttle low), ... the controller/motors can't keep the Mavic level and a noisy wobbling appears very clearly!
The only reason i see they made this compromise, is the folding design restrictions and the free field of view for the camera (no propellers)
Sad imo...

")









